dynamo对于vLLM的给懂是一个patch文件,vLLM给了一个PR 方便在线对比。
PD分离的背景介绍
在大模型推理中,Prefill 和 Decode 的计算特性存在显著差异:
Prefill :计算密集型,计算比例更高。Decode :访存密集型,访存比例更高。
Decode 的计算依赖于 Prefill 生成的 KV Cache。在没有 PD 分离的情况下,较长的 Prefill 通常会优先占用计算资源,导致长 Prompt 的 Prefill 时间过长,从而增加 Decode 的延迟。
Chunked Prefill 的局限性
为了解决上述问题,Chunked Prefill 是一种常见的优化方案,但它也存在以下挑战:
适合超长 Context Length :Chunked Prefill 能有效降低中间显存的占用,但仅适用于超长上下文场景。大 Chunked Prefill 的影响 :当大 Chunk Prefill 和 Decode 同时出现在一个 Batch 中时,会显著拖慢 Decode 的速度。小 Chunked Prefill 的退化 :小 Chunk Prefill 容易退化为 Memory Bound,导致计算单元的利用率(MFU)下降。
因此,PD 分离的优势在于可以分别优化 Prefill 和 Decode 的性能。
Dynamo 的 PD 分离策略
Dynamo 使用了一种条件 PD 分离策略:
仅在满足特定条件时,Prefill 才会远程计算;否则,仍然在本地进行 PD 混合计算。
PD 分离的实现主要包括两部分:
模型的切分与传输 :通过合理的切分策略和高效的传输机制实现计算资源的分离。高效的异步传输或存储引擎 :这是性能优化的关键,尤其是 KV Cache 的传输或存储。
KV Cache 传输的挑战
以 A100 为例,在 8B LLAMA 模型下,Prefill 的计算速度可达 1 万 tokens/s,这会产生约 3GB 的 KV Cache 数据,给传输带宽带来极大压力。
xPyD 的主要设计概要
以下是 xPyD 的主要设计概要,不同框架可能在 PD 负载均衡方式、KV 传输和存储上有所不同。
KV Cache 的切分
TP 条件下的切分
在 Tensor Parallel (TP) 条件下,KV Cache 按照 head 进行切分。例如,对于 Qwen 小模型,其 KV head 数为 8,Q head 数为 40,hidden size 为 5120。8 * 5120 / 40 = 1024
如果 P/D TP比例为 2,则 P 会沿着 head 切分为两部分。传输引擎会将切分后的 tensor 发送给每个 D。8 / 2 * 5120 / 40 = 512
需要注意,上述计算未包含数据宽度。如果数据类型为 FP8,则宽度为 1;如果为 BF16,则宽度为 2。
PP 条件下的切分
在 Pipeline Parallel (PP) 条件下,切分相对简单,直接沿着层进行切分即可。例如,如果 P/D PP比例为 2,且模型有 64 层,则:
层 0-31 分配给 D0
层 32-63 分配给 D1
这种切分方式无需对 tensor 进行额外处理。
DP 和 EP 条件下的切分
EP:EP 主要用于 FFN,与注意力机制无关,因此无需考虑 EP 条件下的切分。
DP:DP 条件下无需切分。如果 P/D 比例为 2,直接将 P 的副本同时发送给两个 D 即可。
传输方式
P2P 传输
P2P 传输采用点对点方式:
P 向 D 建立 RDMA 连接,并申请 RDMA 的 VRAM。
P 直接将数据发送给 D。
KV Cache Store
KV Cache Store 属于 Pooling 模式,支持以下功能:
中间存储 :P 将数据存储到 KV Store,D 从 KV Store 中领取数据。缓存优化 :Store 也可以基于 P2P 实现,支持显存缓存、内存或 SSD 上的 KV Cache Swap。Prefix Cache 共享 :通过中间存储,可以实现跨请求的 Prefix Cache 共享。
PD 顺序
Dynamo 的策略 :Dynamo 采用先 Decode 后 Prefill 的条件PD策略。请求首先发送到 Decode 实例。如果是短的 Prefill,Decode 实例会直接计算,无需触发远端 Prefill;如果需要远端 Prefill,则会触发远端计算。其他框架的策略 :大多数框架采用先 Prefill 后 Decode 的策略。请求先由 Prefill 计算出第一个bonus token,然后转交给 Decode 继续计算。
Dynamo 实现分析
本文仅分析 Dynamo 对 vLLM 本身的一些改动,不涉及 Dynamo 在上层的工作,例如全局基于消息队列的 PrefillQueue 是在上层实现的。
Dynamo 基于 vLLM V0 的调度器实现。V0 的调度器主要将 Prefill 和 Decode 明确分开,而 V1 的调度器则考虑了 Chunked Prefill,不再在调度器内部区分 Prefill 和 Decode 两种 sequence。
vLLM V0 调度器回顾
在 vLLM V0 的实现中,engine 的 step 方法会调用调度器,调度器负责给出需要执行的 sequence group request,然后调用模型执行器(model executor)执行这些请求。执行完成后,调度器会处理结果并更新被调度请求的状态。
LLMEngine
LLMEngine 是 vLLM 的核心组件之一,负责协调调度器和模型执行器的工作。Dynamo 在此基础上进行了扩展,以支持 PD 分离的功能。
增加_finished_transfers和_finished_prefills用于保存prefill的传输结束的request和decode接收传输的request,这两个变量会传给调度器。
remote_prefill_requests保存在remote prefill中的requests。
调度结束以后会拆分出running request和remote prefill requests。
对于running request逻辑不变,但是remote prefill requests会在model execution执行前先发出去。方法是给seq的remote_prefill_request_callback添加remote_prefill_request。
通过比较computed_block_nums是否等于block_table标记完成并且放入到本地的_finished_prefills当中。
到prefill视角来看,会在memory_transfer_reqs中加入已经计算好的computed block和requestid等信息构造的MemoryTransferRequest。
excute_model_req会增加一个需要传输的requests。
execute_model_req.memory_transfer_requests = memory_transfer_reqs
然后开始执行model_excutor的excute_model。
根据执行结果返回的request_notif_counter和request_done_counter更新对应的_finished_prefills和_finished_transfers。
上层需要初始化LLMEngine的NIXL Agent。
Schedule
调度器的改动其实比较简单,对于prefill角度,prefill结束的释放掉request,decode角度把remote prefill结束的变成running走原本的decode流程。
除了running之外额外增加了一个remote_prefilling的queue用于管理在远端prefill的请求,他和running queue的关系是有相似性的,remote_prefilling,但他们的区别在于是不是在本地running。prefill_sending用户标记正在传输的prefill。
调度主体会接收finished_prefills和finished_transfers用于D标记的远端prefill结束(已经传到了本地)和P标记已经完成传输的requests。
当remote_prefilling的中的request在finished_prefills中时代表prefill结束,会把状态设置为running并且开始decode调度。prefill_sending的中的request在finished_transfers中时代表prefill传输结束,会free掉这个request。
prefill_sending和finished_transfers是一对,是对于prefill instance来说的。remote_prefilling和finished_prefills是一对,是对于decode instance来说的。
seq_group中会添加is_remote_decode这个用于标记这个请求只在自己这里prefill,decode要在decode instance上做,这个标记是上层的worker设置的,不在vLLM层。
每个sequence group会添加一个标记,seq_group.remote_prefill_params.is_remote_prefill,标记了就加入到remote_prefilling队列中
EventManager
只和 router 负载均衡有关。
worker 上有 KVPublisher 负责发送 kvcache 的创建和删除事件,同时 KvMetricsPublisher 用于发送监控指标(如队列排队长度等)。
路由策略基于 KV match rate - Load 的最大值,旨在平衡负载与 kvcache 的匹配度。
PrefixCachingBlockAllocator加入了event_manager。KVCacheEventManager实现就不细说了,就是一个事件收发器。
在evict block的时候,发送删除事件event_manager.enqueue_removed_event(content_hash_to_evict)event_manager.enqueue_stored_event(block.prev_block, block)。
NIXL Transfer
数据传输的切分
假设:
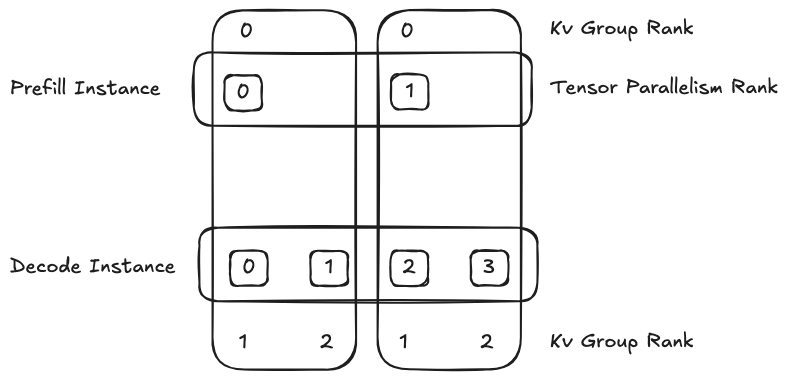
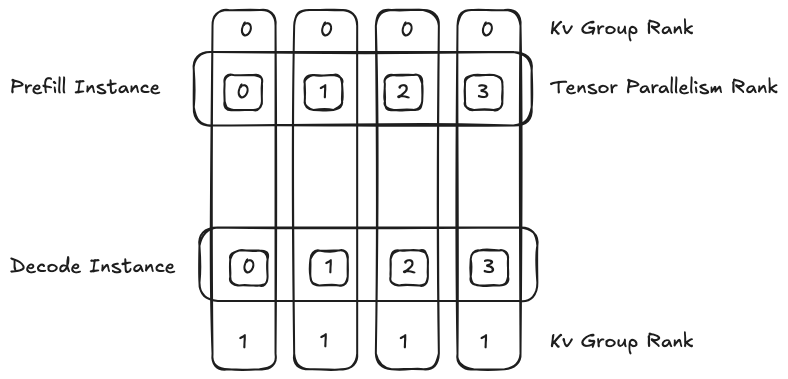
PS(prefill parallel size)=1DS(decode parallel size)=1PTP(prefill tensor parallel size)=2DTP(decode tensor parallel size)=4
存在两个 kvgroup:P0,D0,D1 和 P1,D2,D3。
计算可得:TPM(tensor parallel multiplier) = DTP/PTP = 2
由此可以推导出以下关系:
kv_rank:表示每个 P 或者 D 实例的序号,在本示例中分别为 0 和 1。p_kv_group_rank = kv_rankd_kv_group_rank = PS + (kv_rank - PS) * TPM + rank % TPMkv_world_size = PS + DS * TPMp_kv_global_rank = kv_rank * PTP + rankd_kv_global_rank = PS * PTP + (kv_rank - PS) * DTP + rank
关于集合通信的端口号的 base:
p_port_offset_base = 2 * rank + 1d_port_offset_base = 2 * rank//TPM + 1
以下是具体的参数值表格:
role
rank
kv_rank
kv_group_rank
kv_world_size
kv_global_rank
port_offset_base
P
0
0
0
3
0
1
P
1
0
0
3
1
3
D
0
1
1
3
2
1
D
1
1
2
3
3
1
D
2
1
1
3
4
3
D
3
1
2
3
5
3
初始化 rank 0 收集all_gather所有的parallel_config
每有一个kv_role = kv_producer则kv_producers_parallel_size就+1。
第一步当然要支持xPyD的配置,比如下面的配置。
P的并行规模
1 kv_producers_parallel_size: Optional[int] = None
P的TP
1 kv_producers_tensor_parallel_size: Optional[int] = None
P的PP
1 kv_producers_pipeline_parallel_size: Optional[int] = None
D的TP
1 kv_consumers_tensor_parallel_size: Optional[int] = None
D的PP
1 kv_consumers_pipeline_parallel_size: Optional[int] = None
属性函数tensor_parallel_multiplier是 p的tp // d的tp
然后总结一下各种pp,tp,rank的关系。
TP的倍率由D的TP地板除P的TP:tensor_parallel_multiplier = self.kv_consumers_tensor_parallel_size // self.kv_producers_tensor_parallel_size
D的并行规模是整体并行规模减去P的并行规模: kv_consumers_parallel_size = self.kv_parallel_size - self.kv_producers_parallel_size
kv_world_size = self.kv_producers_parallel_size + self.kv_consumers_parallel_size * self.tensor_parallel_multiplier
发送的入口是send_kv_caches_and_hidden_states
这个函数的主要工作是根据TP的大小,从Prefill worker上切出Decode worker上需要的tensor
在这个函数中根据自己的rank计算对应的D的rank。
笔者写了一个简易版的示例带代码方便查看对应的shape
1 2 3 4 5 6 7 8 9 10 11 12 13 14 15 16 17 18 19 20 21 22 23 24 25 26 27 28 29 30 31 32 33 import torchkey_cache = torch.randn(10 , 8 , 8 ) print ("原始 key_cache shape" )print (key_cache.shape)current_slot_mapping = [0 ,5 ] p_tp = 2 d_tp = 4 tp_multiplier = d_tp // p_tp target_rank = 0 num_heads_per_rank = 8 // p_tp // d_tp head_start = target_rank * num_heads_per_rank head_end = head_start + num_heads_per_rank key_cache = key_cache.reshape(-1 ,8 //p_tp,8 ) print ("按 prefill tp 切分" )print (key_cache.shape)print ("decode 选择器(在第0维度)" , current_slot_mapping, ",head range(在第1维度)" , str (head_start)+":" +str (head_end))d_key_cache = key_cache[current_slot_mapping, head_start:head_end] print ("获取 d key cache" )print (d_key_cache.shape)
相对应的接收函数的入口recv_kv_caches_and_hidden_states 没啥特殊处理,直接已经切好,收到以后直接cache住就行。